Փափուկ մեկնարկիչը շարժիչի կառավարման սարք է, որը համատեղում է փափուկ մեկնարկի, փափուկ կանգառի, թեթև բեռի էներգախնայողության և բազմաթիվ պաշտպանության գործառույթները: Այն հիմնականում բաղկացած է եռաֆազ հակազուգահեռ տիրիստորներից, որոնք հաջորդաբար միացված են սնուցման աղբյուրին և կառավարվող շարժիչին, ինչպես նաև դրա էլեկտրոնային կառավարման սխեմային: Եռաֆազ հակազուգահեռ տիրիստորների հաղորդականության անկյունը կառավարելու համար օգտագործվում են տարբեր մեթոդներ, որպեսզի կառավարվող շարժիչի մուտքային լարումը փոխվի տարբեր պահանջներին համապատասխան:
1. Ընդունում է միկրոպրոցեսորային թվային ավտոմատ կառավարում, այն ունի հիանալի էլեկտրամագնիսական կատարողականություն՝ մեղմ մեկնարկ, մեղմ կանգառ կամ ազատ կանգառ:
2. Մեկնարկային լարումը, հոսանքը, մեղմ մեկնարկի և մեղմ կանգի ժամանակը կարող են ընտրվել տարբեր բեռնվածությունների համաձայն՝ մեկնարկային հոսանքի հարվածը նվազեցնելու համար: Կայուն աշխատանք, հեշտ շահագործում, ուղղակի ցուցադրում, փոքր ծավալ, թվային հավաքածու, ունի հեռակառավարման և արտաքին կառավարման գործառույթներ:
3. Պաշտպանված է փուլային կորստից, գերլարումից, գերբեռնվածությունից, գերհոսանքից, գերտաքացումից։
4. Ունի մուտքային լարման ցուցադրման, աշխատանքային հոսանքի ցուցադրման, խափանումների ինքնաստուգման, խափանումների հիշողության գործառույթներ։ Ունի 0-20mA մոդելավորման արժեքի ելք, կարող է իրականացնել շարժիչի հոսանքի մոնիթորինգ։
AC ասինխրոն շարժիչն ունի ցածր գին, բարձր հուսալիություն և հազվադեպ սպասարկում։
Թերություններ՝
1. մեկնարկային հոսանքը 5-7 անգամ ավելի բարձր է, քան անվանական հոսանքը։ Եվ դա պահանջում է, որ էլեկտրամատակարարման լարը ունենա մեծ մարժա, և դա նաև կնվազեցնի էլեկտրական կառավարման սարքի աշխատանքային կյանքը՝ բարելավելով սպասարկման արժեքը։
2. Մեկնարկային մոմենտը կրկնակի անգամ փոխվում է սովորական մեկնարկային մոմենտի, ինչը հանգեցնում է բեռի ցնցման և շարժիչի բաղադրիչների վնասման: RDJR6 մեղմ մեկնարկիչը կիրառում է կառավարելի թիայիստորային մոդուլ և փուլային տեղաշարժի տեխնոլոգիա՝ շարժիչի լարումը պարբերաբար բարելավելու համար: Եվ այն կարող է իրականացնել շարժիչի մոմենտի, հոսանքի և բեռի պահանջները՝ կառավարման պարամետրի միջոցով: RDJR6 շարքի մեղմ մեկնարկիչը կիրառում է միկրոպրոցեսոր՝ AC ասինխրոն շարժիչի մեղմ մեկնարկի և մեղմ կանգառի գործառույթները կառավարելու և իրականացնելու համար, ունի ամբողջական պաշտպանության գործառույթ և լայնորեն կիրառվում է մետաղագործության, նավթի, հանքարդյունաբերության, քիմիական արդյունաբերության ոլորտներում շարժիչային շարժիչային սարքավորումներում:
Արտադրության սպեցիֆիկացիա
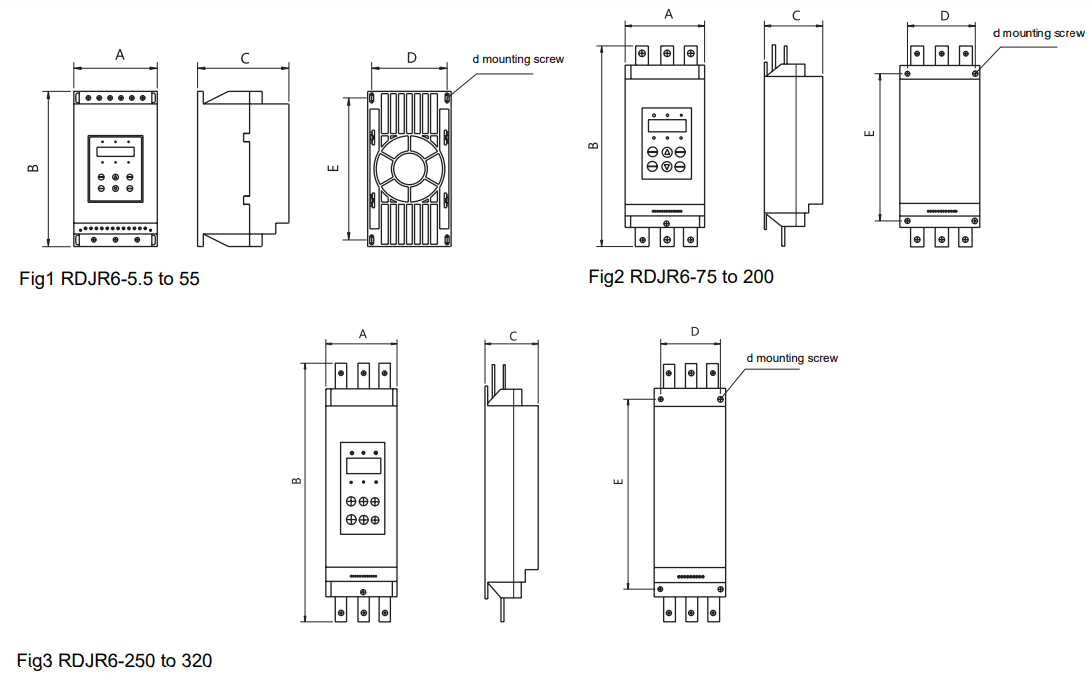
| Մոդելի համարը | Գնահատված հզորություն (կՎտ) | Գնահատված հոսանք (Ա) | Կիրառական շարժիչի հզորություն (կՎտ) | Ձևի չափսը (մմ) | Քաշը (կգ) | Նշում | |||||
| A | B | C | D | E | d | ||||||
| RDJR6-5.5 | 5.5 | 11 | 5.5 | 145 | 278 | 165 | 132 | 250 | M6 | 3.7 | Նկ. 2.1 |
| RDJR6-7.5 | 7.5 | 15 | 7.5 | ||||||||
| RDJR6-11 | 11 | 22 | 11 | ||||||||
| RDJR6-15 | 15 | 30 | 15 | ||||||||
| RDJR6-18.5 | 18.5 | 37 | 18.5 | ||||||||
| RDJR6-22 | 22 | 44 | 22 | ||||||||
| RDJR6-30 | 30 | 60 | 30 | ||||||||
| RDJR6-37 | 37 | 74 | 37 | ||||||||
| RDJR6-45 | 45 | 90 | 45 | ||||||||
| RDJR6-55 | 55 | 110 | 55 | ||||||||
| RDJR6-75 | 75 | 150 | 75 | 260 | 530 | 205 | 196 | 380 | M8 | 18 | Նկ. 2.2 |
| RDJR6-90 | 90 | 180 | 90 | ||||||||
| RDJR6-115 | 115 | 230 | 115 | ||||||||
| RDJR6-132 | 132 | 264 | 132 | ||||||||
| RDJR6-160 | 160 | 320 | 160 | ||||||||
| RDJR6-185 | 185 | 370 | 185 | ||||||||
| RDJR6-200 | 200 | 400 | 200 | ||||||||
| RDJR6-250 | 250 | 500 | 250 | 290 | 570 | 260 | 260 | 470 | M8 | 25 | Նկ. 2.3 |
| RDJR6-280 | 280 | 560 | 280 | ||||||||
| RDJR6-320 | 320 | 640 | 320 | ||||||||
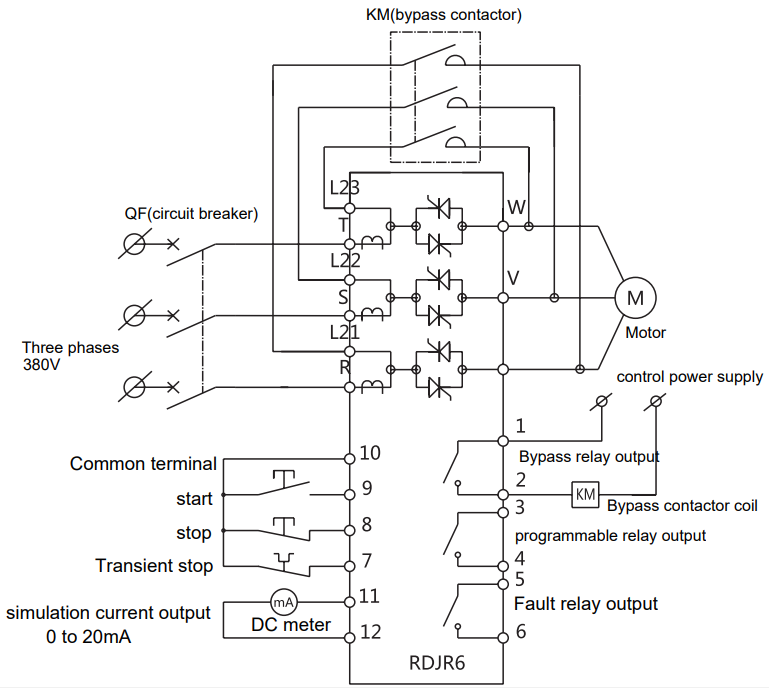
Դիագրամ
Ֆունկցիոնալ պարամետր
| Կոդ | Ֆունկցիայի անվանումը | Կարգավորման միջակայք | Լռելյայն | Հրահանգ | |||||||
| P0 | սկզբնական լարումը | (30-70) | 30 | PB1=1, լարման թեքության մոդելը արդյունավետ է. երբ PB կարգավորումը հոսանքի ռեժիմում է, սկզբնական լարման լռելյայն արժեքը 40% է։ | |||||||
| P1 | մեղմ մեկնարկի ժամանակը | (2-60) վրկ | 16 վայրկյան | PB1=1, լարման թեքության մոդելը արդյունավետ է | |||||||
| P2 | մեղմ կանգառի ժամանակը | (0-60) վրկ | 0s | Կարգավորում=0, ազատ կանգառի համար։ | |||||||
| P3 | ծրագրի ժամանակը | (0-999) վրկ | 0s | Հրամաններ ստանալուց հետո, P3 արժեքը սահմանելուց հետո մեկնարկը հետաձգելու համար օգտագործվում է հետհաշվարկի տեսակը։ | |||||||
| P4 | մեկնարկի ուշացում | (0-999) վրկ | 0s | Ծրագրավորվող ռելեի գործողության ուշացում | |||||||
| P5 | ծրագրի ուշացում | (0-999) վրկ | 0s | Գերտաքացումը վերացնելուց և P5 կարգավորման հետաձգումից հետո այն պատրաստի վիճակում էր։ | |||||||
| P6 | ինտերվալի ուշացում | (50-500)% | 400% | Կապված է PB կարգավորման հետ, երբ PB կարգավորումը 0 է, լռելյայն արժեքը 280% է, և փոփոխությունը ուժի մեջ է։ Երբ PB կարգավորումը 1 է, սահմանային արժեքը 400% է։ | |||||||
| P7 | սահմանափակ մեկնարկային հոսանք | (50-200)% | 100% | Օգտագործեք շարժիչի գերբեռնվածությունից պաշտպանության արժեքը կարգավորելու համար, P6, P7 մուտքային տեսակը կախված է P8-ից։ | |||||||
| P8 | Առավելագույն աշխատանքային հոսանք | 0-3 | 1 | Օգտագործվում է ընթացիկ արժեքը կամ տոկոսները սահմանելու համար | |||||||
| P9 | ընթացիկ ցուցադրման ռեժիմ | (40-90)% | 80% | Կարգավորված արժեքից ցածր, ձախողման ցուցիչը «Err09» է։ | |||||||
| PA | ցածր լարման պաշտպանություն | (100-140)% | 120% | Սահմանված արժեքից բարձր լինելու դեպքում խափանման ցուցիչը «Err10» է։ | |||||||
| PB | մեկնարկային մեթոդ | 0-5 | 1 | 0 հոսանքի սահմանափակմամբ, 1 լարման, 2 հարվածային + հոսանքի սահմանափակմամբ, 3 հարվածային + հոսանքի սահմանաչափով, 4 հոսանքի թեքությամբ, 5 կրկնակի օղակային տիպ | |||||||
| PC | ելքային պաշտպանությունը թույլ է տալիս | 0-4 | 4 | 0 հիմնական, 1 րոպե բեռնվածություն, 2 ստանդարտ, 3 ծանր բեռնվածություն, 4 ավագ | |||||||
| PD | գործառնական կառավարման ռեժիմ | 0-7 | 1 | Օգտագործեք վահանակի և արտաքին կառավարման տերմինալի կարգավորումները ընտրելու համար: 0, միայն վահանակի աշխատանքի համար, 1՝ և՛ վահանակի, և՛ արտաքին կառավարման տերմինալի աշխատանքի համար: | |||||||
| PE | ավտոմատ վերագործարկման ընտրություն | 0-13 | 0 | 0: արգելված, 1-9՝ ավտոմատ վերագործարկման ժամանակների համար | |||||||
| PF | պարամետրի փոփոխություն թույլատրել | 0-2 | 1 | 0: fohibid, 1՝ թույլատրելի մասի փոփոխված տվյալների համար, 2՝ թույլատրելի բոլոր փոփոխված տվյալների համար | |||||||
| PH | կապի հասցե | 0-63 | 0 | Օգտագործվում է բազմակի մեղմ մեկնարկիչի և վերին սարքի հաղորդակցման համար | |||||||
| PJ | ծրագրի արդյունքը | 0-19 | 7 | Օգտագործվում է ծրագրավորվող ռելեի ելքի (3-4) կարգավորման համար։ | |||||||
| PL | մեղմ կանգառի հոսանքը սահմանափակ է | (20-100)% | 80% | Օգտագործեք P2 մեղմ կանգառի հոսանքի սահմանափակման կարգավորման համար | |||||||
| PP | շարժիչի անվանական հոսանքը | (11-1200)Ա | գնահատված արժեք | Օգտագործեք շարժիչի անվանական հոսանքը մուտքագրելու համար | |||||||
| PU | շարժիչի ցածր լարման պաշտպանություն | (10-90)% | արգելել | Օգտագործվում է շարժիչի ցածր լարումից պաշտպանության գործառույթները կարգավորելու համար։ | |||||||
Խափանման հրահանգ
| Կոդ | Հրահանգ | Խնդիր և լուծում | |||||||||
| Սխալ00 | առանց ձախողման | Լարման ցածր մակարդակի, գերլարման, գերտաքացման կամ ժամանակավոր կանգառի բացման հետ կապված խափանումը շտկվել է։ Եվ վահանակի ցուցիչը վառվում է, սեղմեք «կանգ» կոճակը՝ վերագործարկելու համար, այնուհետև գործարկեք շարժիչը։ | |||||||||
| Սխալ01 | Արտաքին անցումային կանգառի տերմինալը բաց է | Ստուգեք, թե արդյոք արտաքին անցումային տերմինալ 7-ը և ընդհանուր տերմինալ 10-ը կարճ միացում ունեն, թե՞ մյուս պաշտպանիչ սարքերի NC շփումը նորմալ է։ | |||||||||
| Err02 | մեղմ մեկնարկիչի գերտաքացում | Ռադիատորի ջերմաստիճանը գերազանցում է 85°C-ը, գերտաքացումից պաշտպանություն, մեղմ մեկնարկիչը չափազանց հաճախակի է միացնում շարժիչը կամ շարժիչի հզորությունը կիրառելի չէ մեղմ մեկնարկիչի համար։ | |||||||||
| Err03 | սկսելով լրացուցիչ ժամանակը | Կարգավորումների մեկնարկային տվյալները կիրառելի չեն կամ բեռը չափազանց մեծ է, հզորությունը՝ չափազանց փոքր | |||||||||
| Err04 | մուտքային փուլի կորուստ | Ստուգեք, թե արդյոք մուտքը կամ գլխավոր օղակը խափանված են, կամ արդյոք շրջանցիկ կոնտակտորը կարող է խափանվել և շղթան նորմալ դարձնել, կամ արդյոք սիլիկոնային կառավարման վահանակը բաց է։ | |||||||||
| Err05 | ելքային փուլի կորուստ | Ստուգեք, թե արդյոք մուտքը կամ գլխավոր օղակը խափանված են, կամ արդյոք շրջանցիկ կոնտակտորը կարող է խափանվել և շղթան նորմալ դարձնել, կամ արդյոք սիլիկոնային կառավարման վահանակը բաց է, կամ արդյոք շարժիչի միացումը որոշ խափանումներ ունի։ | |||||||||
| Err06 | անհավասարակշռված եռաֆազ | Ստուգեք, թե արդյոք մուտքային եռաֆազ հոսանքը և շարժիչը որոշ սխալներ ունեն, կամ արդյոք հոսանքի տրանսֆորմատորը ազդանշաններ է տալիս։ | |||||||||
| Err07 | մեկնարկային գերհոսանք | Եթե բեռը չափազանց մեծ է կամ շարժիչի հզորությունը կիրառելի է մեղմ մեկնարկիչի միջոցով, կամ PC-ի (ելքի պաշտպանությունը թույլատրված է) կարգավորման արժեքի սխալը։ | |||||||||
| Err08 | գործառնական գերբեռնվածության պաշտպանություն | Եթե բեռը չափազանց ծանր է կամ P7 է, PP կարգավորման սխալ է։ | |||||||||
| Err09 | ցածր լարում | Ստուգեք, թե արդյոք P9-ի մուտքային լարումը կամ կարգավորման ամսաթիվը սխալ են։ | |||||||||
| Err10 | գերլարում | Ստուգեք, թե արդյոք մուտքային լարումը կամ PA-ի կարգավորման ամսաթիվը սխալ են։ | |||||||||
| Err11 | տվյալների կարգավորման սխալ | Փոփոխեք կարգավորումը կամ սեղմեք «Enter» կոճակը՝ վերագործարկումը սկսելու համար | |||||||||
| Err12 | բեռնման կարճ միացում | Ստուգեք, թե արդյոք սիլիկոնը կարճ միացում չունի, կամ բեռը չափազանց ծանր է, կամ շարժիչի կծիկը կարճ միացում ունի։ | |||||||||
| Err13 | վերագործարկման միացման սխալ | Ստուգեք, թե արդյոք արտաքին մեկնարկային տերմինալ 9-ը և կանգառի տերմինալ 8-ը միացված են երկգծային տեսակին համապատասխան։ | |||||||||
| Err14 | Արտաքին կանգառի տերմինալի միացման սխալ | Երբ PD կարգավորումը 1, 2, 3, 4 է (թույլատրվում է արտաքին կառավարման), արտաքին կանգառի տերմինալ 8-ը և ընդհանուր տերմինալ 10-ը կարճ միացում չեն առաջացնում։ Միայն եթե դրանք կարճ միացում լինեին, շարժիչը կարող է մեկնարկվել։ | |||||||||
| Err15 | շարժիչի թերբեռնվածություն | Ստուգեք շարժիչի և բեռի սխալը։ | |||||||||
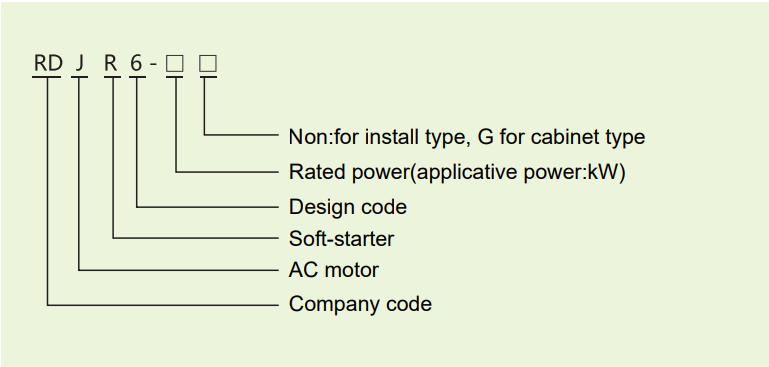
Մոդելի համարը
Արտաքին կառավարման տերմինալ

Արտաքին կառավարման տերմինալի սահմանում
| Փոխել արժեքը | Տերմինալի կոդ | Տերմինալի ֆունկցիա | Հրահանգ | |||||||
| Ռելեի ելք | 1 | Շրջանցման ելք | կառավարման շրջանցիկ կոնտակտոր, երբ մեղմ մեկնարկիչը հաջողությամբ մեկնարկում է, այն առանց էլեկտրամատակարարման կոնտակտ չէ, հզորություն՝ AC250V/5A | |||||||
| 2 | ||||||||||
| 3 | Ծրագրավորվող ռելեի ելք | Արդյունքի տեսակը և գործառույթները կարգավորվում են P4-ով և PJ-ով, այն առանց կոնտակտի է առանց էլեկտրամատակարարման, հզորություն՝ AC250V/5A | ||||||||
| 4 | ||||||||||
| 5 | Անսարքության ռելեի ելք | Երբ մեղմ մեկնարկիչը խափանումներ է ունենում, այս ռելեն փակ է, առանց էլեկտրամատակարարման կոնտակտ չկա, հզորությունը՝ AC250V/5A | ||||||||
| 6 | ||||||||||
| Մուտքագրում | 7 | Ժամանակավոր կանգառ | Փափուկ մեկնարկիչը նորմալ մեկնարկելու դեպքում այս տերմինալը պետք է կրճատվի տերմինալ 10-ով։ | |||||||
| 8 | Կանգնեցնել/վերագործարկել | միանում է 10-րդ տերմինալին՝ 2-գծային, 3-գծային համակարգերը կառավարելու համար, ըստ միացման մեթոդի։ | ||||||||
| 9 | Սկսել | |||||||||
| 10 | Ընդհանուր տերմինալ | |||||||||
| Անալոգային ելք | 11 | սիմուլյացիայի ընդհանուր կետ (-) | 4 անգամ անվանական հոսանքի ելքային հոսանքը 20 մԱ է, այն կարող է նաև հայտնաբերվել արտաքին հաստատուն հոսանքի չափիչով, այն կարող է ունենալ ելքային բեռի առավելագույն դիմադրություն՝ 300։ | |||||||
| 12 | մոդելավորման հոսանքի ելք (+) | |||||||||
Ցուցադրման վահանակ

| Ցուցիչ | Հրահանգ | ||||||||
| ՊԱՏՐԱՍՏ | Երբ սարքը միացված է և պատրաստ է, այս ցուցիչը վառվում է | ||||||||
| ԱՆՑՆԵԼ | շրջանցիկ համակարգի գործարկման ժամանակ այս ցուցիչը վառվում է | ||||||||
| ՍԽԱԼ | երբ խափանում է տեղի ունենում, այս ցուցիչը թեթև է | ||||||||
| A | սահմանման տվյալները ընթացիկ արժեքն են, այս ցուցիչը լուսավորվում է | ||||||||
| % | կարգավորման տվյալները ընթացիկ տոկոսն են, այս ցուցիչը վառ է | ||||||||
| s | տվյալների սահմանումը ժամանակն է, այս ցուցիչը լուսավորվում է | ||||||||
վիճակի ցուցիչի հրահանգ
Կոճակի հրահանգ
RDJR6 շարքի մեղմ մեկնարկիչն ունի 5 տեսակի աշխատանքային վիճակ՝ պատրաստ, աշխատանք, խափանում, մեկնարկ և կանգառ, պատրաստ, աշխատանք, խափանում։
ունի հարաբերական ցուցիչի ազդանշան։ Հրահանգը տե՛ս վերևում գտնվող աղյուսակում։
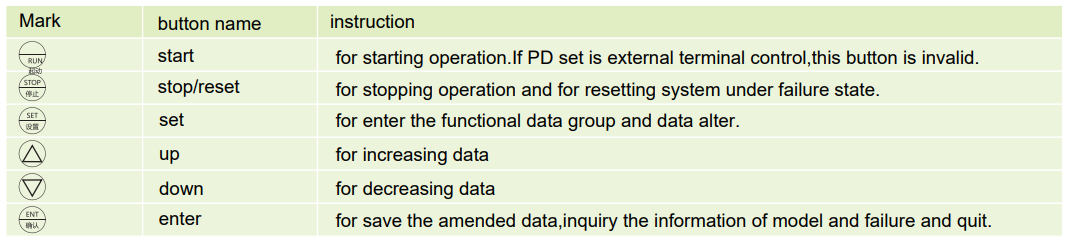
Փափուկ մեկնարկի և փափուկ կանգառի գործընթացներում այն չի կարող տվյալներ սահմանել, միայն եթե այն գտնվում է այլ վիճակում։
Կարգավորման վիճակում, կարգավորման վիճակը կդադարեցվի առանց որևէ գործողության 2 րոպեից հետո։
Սկզբում սեղմեք «Enter» կոճակը, այնուհետև լիցքավորեք և միացրեք մեկնարկիչը։ Ահազանգը լսելուց հետո կարող եք վերագործարկել
տվյալների վերադարձի գործարանային արժեքը։
Արտաքին տեսքը և տեղադրման չափերը
Կիրառման դիագրամ
Նորմալ կառավարման դիագրամ
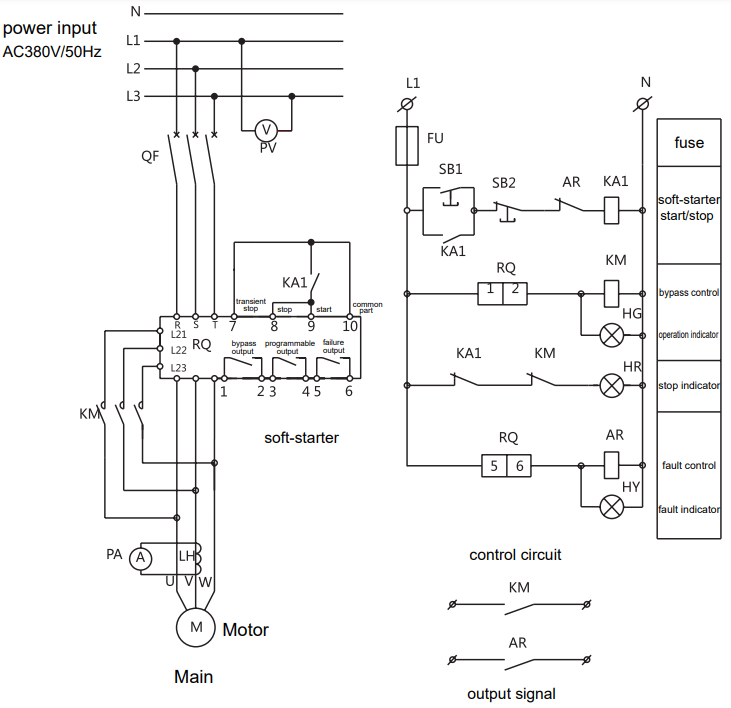
Հրահանգ:
1. Արտաքին տերմինալը ընդունում է երկու գծի tcontrol տեսակը: Երբ KA1-ը փակ է մեկնարկի համար, բաց է կանգառի համար:
2. 75 կՎտ-ից բարձր հզորությամբ փափուկ մեկնարկիչը պետք է կառավարի շրջանցիկ կոնտակտորի կծիկը միջին ռելեով, քանի որ փափուկ մեկնարկիչի ներքին ռելեի կոնտակտի սահմանափակ շարժիչ հզորությունը։
12.2 մեկ ընդհանուր և մեկ սպասման կառավարման սխեմա
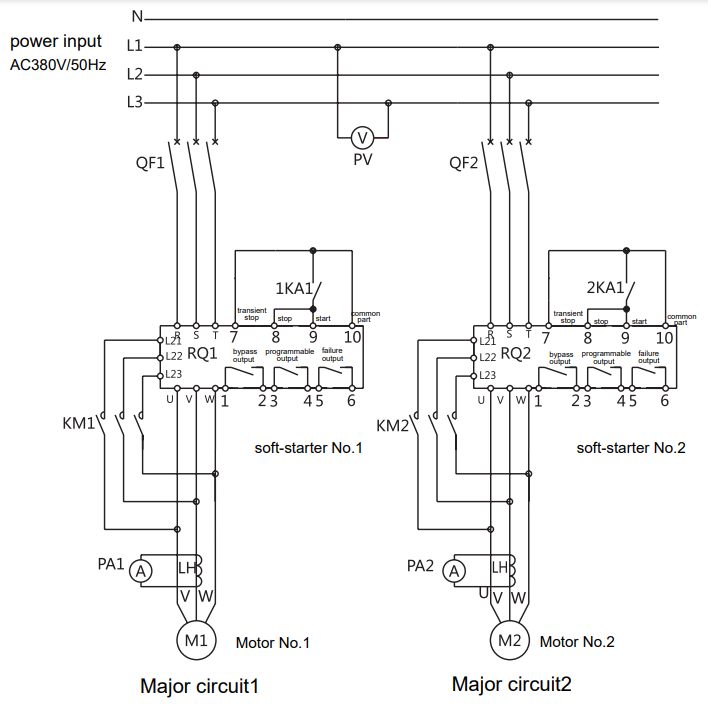
12.3 մեկ ընդհանուր և մեկ պահեստային կառավարման սխեմա
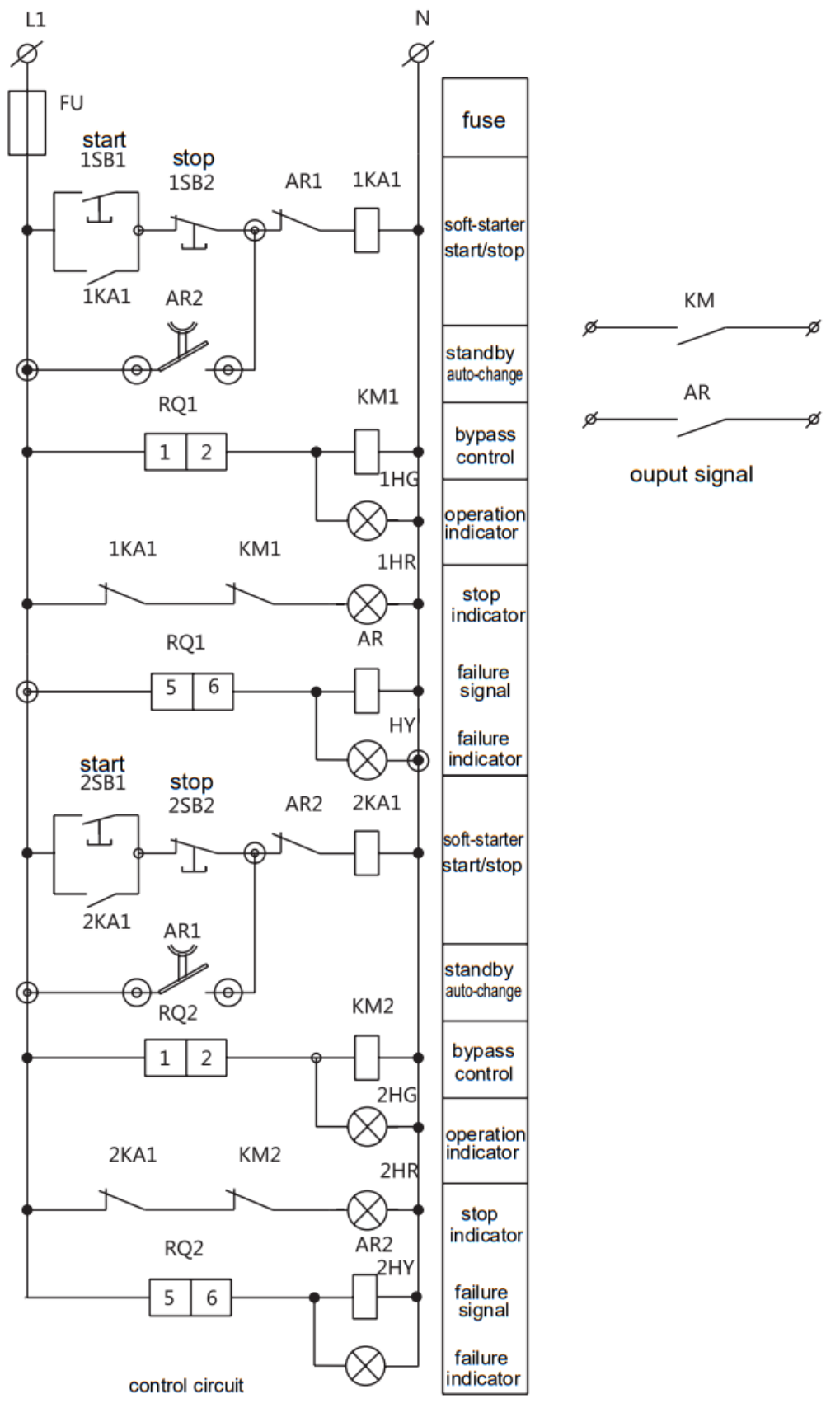
Հրահանգ:
1. Դիագրամում արտաքին տերմինալը ընդունում է երկգծային տեսակը
(երբ 1KA1-ը կամ 2KA1-ը փակ է, այն միանում է։ Երբ դրանք կոտրվում են, այն կանգ է առնում։)
2. 75 կՎտ-ից բարձր հզորությամբ մեղմ մեկնարկիչը պետք է կառավարի շրջանցիկ կոնտակտորի կծիկը միջին ռելեի միջոցով՝ մեղմ մեկնարկիչի ներքին միջին ռելեի կոնտակտի սահմանափակ շարժիչ հզորության պատճառով:
AC ասինխրոն շարժիչն ունի ցածր գին, բարձր հուսալիություն և հազվադեպ սպասարկում։
Թերություններ՝
1. մեկնարկային հոսանքը 5-7 անգամ ավելի բարձր է, քան անվանական հոսանքը։ Եվ դա պահանջում է, որ էլեկտրամատակարարման լարը ունենա մեծ մարժա, և դա նաև կնվազեցնի էլեկտրական կառավարման սարքի աշխատանքային կյանքը՝ բարելավելով սպասարկման արժեքը։
2. Մեկնարկային մոմենտը կրկնակի անգամ փոխվում է սովորական մեկնարկային մոմենտի, ինչը հանգեցնում է բեռի ցնցման և շարժիչի բաղադրիչների վնասման: RDJR6 մեղմ մեկնարկիչը կիրառում է կառավարելի թիայիստորային մոդուլ և փուլային տեղաշարժի տեխնոլոգիա՝ շարժիչի լարումը պարբերաբար բարելավելու համար: Եվ այն կարող է իրականացնել շարժիչի մոմենտի, հոսանքի և բեռի պահանջները՝ կառավարման պարամետրի միջոցով: RDJR6 շարքի մեղմ մեկնարկիչը կիրառում է միկրոպրոցեսոր՝ AC ասինխրոն շարժիչի մեղմ մեկնարկի և մեղմ կանգառի գործառույթները կառավարելու և իրականացնելու համար, ունի ամբողջական պաշտպանության գործառույթ և լայնորեն կիրառվում է մետաղագործության, նավթի, հանքարդյունաբերության, քիմիական արդյունաբերության ոլորտներում շարժիչային շարժիչային սարքավորումներում:
Արտադրության սպեցիֆիկացիա
| Մոդելի համարը | Գնահատված հզորություն (կՎտ) | Գնահատված հոսանք (Ա) | Կիրառական շարժիչի հզորություն (կՎտ) | Ձևի չափսը (մմ) | Քաշը (կգ) | Նշում | |||||
| A | B | C | D | E | d | ||||||
| RDJR6-5.5 | 5.5 | 11 | 5.5 | 145 | 278 | 165 | 132 | 250 | M6 | 3.7 | Նկ. 2.1 |
| RDJR6-7.5 | 7.5 | 15 | 7.5 | ||||||||
| RDJR6-11 | 11 | 22 | 11 | ||||||||
| RDJR6-15 | 15 | 30 | 15 | ||||||||
| RDJR6-18.5 | 18.5 | 37 | 18.5 | ||||||||
| RDJR6-22 | 22 | 44 | 22 | ||||||||
| RDJR6-30 | 30 | 60 | 30 | ||||||||
| RDJR6-37 | 37 | 74 | 37 | ||||||||
| RDJR6-45 | 45 | 90 | 45 | ||||||||
| RDJR6-55 | 55 | 110 | 55 | ||||||||
| RDJR6-75 | 75 | 150 | 75 | 260 | 530 | 205 | 196 | 380 | M8 | 18 | Նկ. 2.2 |
| RDJR6-90 | 90 | 180 | 90 | ||||||||
| RDJR6-115 | 115 | 230 | 115 | ||||||||
| RDJR6-132 | 132 | 264 | 132 | ||||||||
| RDJR6-160 | 160 | 320 | 160 | ||||||||
| RDJR6-185 | 185 | 370 | 185 | ||||||||
| RDJR6-200 | 200 | 400 | 200 | ||||||||
| RDJR6-250 | 250 | 500 | 250 | 290 | 570 | 260 | 260 | 470 | M8 | 25 | Նկ. 2.3 |
| RDJR6-280 | 280 | 560 | 280 | ||||||||
| RDJR6-320 | 320 | 640 | 320 | ||||||||
Դիագրամ
Ֆունկցիոնալ պարամետր
| Կոդ | Ֆունկցիայի անվանումը | Կարգավորման միջակայք | Լռելյայն | Հրահանգ | |||||||
| P0 | սկզբնական լարումը | (30-70) | 30 | PB1=1, լարման թեքության մոդելը արդյունավետ է. երբ PB կարգավորումը հոսանքի ռեժիմում է, սկզբնական լարման լռելյայն արժեքը 40% է։ | |||||||
| P1 | մեղմ մեկնարկի ժամանակը | (2-60) վրկ | 16 վայրկյան | PB1=1, լարման թեքության մոդելը արդյունավետ է | |||||||
| P2 | մեղմ կանգառի ժամանակը | (0-60) վրկ | 0s | Կարգավորում=0, ազատ կանգառի համար։ | |||||||
| P3 | ծրագրի ժամանակը | (0-999) վրկ | 0s | Հրամաններ ստանալուց հետո, P3 արժեքը սահմանելուց հետո մեկնարկը հետաձգելու համար օգտագործվում է հետհաշվարկի տեսակը։ | |||||||
| P4 | մեկնարկի ուշացում | (0-999) վրկ | 0s | Ծրագրավորվող ռելեի գործողության ուշացում | |||||||
| P5 | ծրագրի ուշացում | (0-999) վրկ | 0s | Գերտաքացումը վերացնելուց և P5 կարգավորման հետաձգումից հետո այն պատրաստի վիճակում էր։ | |||||||
| P6 | ինտերվալի ուշացում | (50-500)% | 400% | Կապված է PB կարգավորման հետ, երբ PB կարգավորումը 0 է, լռելյայն արժեքը 280% է, և փոփոխությունը ուժի մեջ է։ Երբ PB կարգավորումը 1 է, սահմանային արժեքը 400% է։ | |||||||
| P7 | սահմանափակ մեկնարկային հոսանք | (50-200)% | 100% | Օգտագործեք շարժիչի գերբեռնվածությունից պաշտպանության արժեքը կարգավորելու համար, P6, P7 մուտքային տեսակը կախված է P8-ից։ | |||||||
| P8 | Առավելագույն աշխատանքային հոսանք | 0-3 | 1 | Օգտագործվում է ընթացիկ արժեքը կամ տոկոսները սահմանելու համար | |||||||
| P9 | ընթացիկ ցուցադրման ռեժիմ | (40-90)% | 80% | Կարգավորված արժեքից ցածր, ձախողման ցուցիչը «Err09» է։ | |||||||
| PA | ցածր լարման պաշտպանություն | (100-140)% | 120% | Սահմանված արժեքից բարձր լինելու դեպքում խափանման ցուցիչը «Err10» է։ | |||||||
| PB | մեկնարկային մեթոդ | 0-5 | 1 | 0 հոսանքի սահմանափակմամբ, 1 լարման, 2 հարվածային + հոսանքի սահմանափակմամբ, 3 հարվածային + հոսանքի սահմանաչափով, 4 հոսանքի թեքությամբ, 5 կրկնակի օղակային տիպ | |||||||
| PC | ելքային պաշտպանությունը թույլ է տալիս | 0-4 | 4 | 0 հիմնական, 1 րոպե բեռնվածություն, 2 ստանդարտ, 3 ծանր բեռնվածություն, 4 ավագ | |||||||
| PD | գործառնական կառավարման ռեժիմ | 0-7 | 1 | Օգտագործեք վահանակի և արտաքին կառավարման տերմինալի կարգավորումները ընտրելու համար: 0, միայն վահանակի աշխատանքի համար, 1՝ և՛ վահանակի, և՛ արտաքին կառավարման տերմինալի աշխատանքի համար: | |||||||
| PE | ավտոմատ վերագործարկման ընտրություն | 0-13 | 0 | 0: արգելված, 1-9՝ ավտոմատ վերագործարկման ժամանակների համար | |||||||
| PF | պարամետրի փոփոխություն թույլատրել | 0-2 | 1 | 0: fohibid, 1՝ թույլատրելի մասի փոփոխված տվյալների համար, 2՝ թույլատրելի բոլոր փոփոխված տվյալների համար | |||||||
| PH | կապի հասցե | 0-63 | 0 | Օգտագործվում է բազմակի մեղմ մեկնարկիչի և վերին սարքի հաղորդակցման համար | |||||||
| PJ | ծրագրի արդյունքը | 0-19 | 7 | Օգտագործվում է ծրագրավորվող ռելեի ելքի (3-4) կարգավորման համար։ | |||||||
| PL | մեղմ կանգառի հոսանքը սահմանափակ է | (20-100)% | 80% | Օգտագործեք P2 մեղմ կանգառի հոսանքի սահմանափակման կարգավորման համար | |||||||
| PP | շարժիչի անվանական հոսանքը | (11-1200)Ա | գնահատված արժեք | Օգտագործեք շարժիչի անվանական հոսանքը մուտքագրելու համար | |||||||
| PU | շարժիչի ցածր լարման պաշտպանություն | (10-90)% | արգելել | Օգտագործվում է շարժիչի ցածր լարումից պաշտպանության գործառույթները կարգավորելու համար։ | |||||||
Խափանման հրահանգ
| Կոդ | Հրահանգ | Խնդիր և լուծում | |||||||||
| Սխալ00 | առանց ձախողման | Լարման ցածր մակարդակի, գերլարման, գերտաքացման կամ ժամանակավոր կանգառի բացման հետ կապված խափանումը շտկվել է։ Եվ վահանակի ցուցիչը վառվում է, սեղմեք «կանգ» կոճակը՝ վերագործարկելու համար, այնուհետև գործարկեք շարժիչը։ | |||||||||
| Սխալ01 | Արտաքին անցումային կանգառի տերմինալը բաց է | Ստուգեք, թե արդյոք արտաքին անցումային տերմինալ 7-ը և ընդհանուր տերմինալ 10-ը կարճ միացում ունեն, թե՞ մյուս պաշտպանիչ սարքերի NC շփումը նորմալ է։ | |||||||||
| Err02 | մեղմ մեկնարկիչի գերտաքացում | Ռադիատորի ջերմաստիճանը գերազանցում է 85°C-ը, գերտաքացումից պաշտպանություն, մեղմ մեկնարկիչը չափազանց հաճախակի է միացնում շարժիչը կամ շարժիչի հզորությունը կիրառելի չէ մեղմ մեկնարկիչի համար։ | |||||||||
| Err03 | սկսելով լրացուցիչ ժամանակը | Կարգավորումների մեկնարկային տվյալները կիրառելի չեն կամ բեռը չափազանց մեծ է, հզորությունը՝ չափազանց փոքր | |||||||||
| Err04 | մուտքային փուլի կորուստ | Ստուգեք, թե արդյոք մուտքը կամ գլխավոր օղակը խափանված են, կամ արդյոք շրջանցիկ կոնտակտորը կարող է խափանվել և շղթան նորմալ դարձնել, կամ արդյոք սիլիկոնային կառավարման վահանակը բաց է։ | |||||||||
| Err05 | ելքային փուլի կորուստ | Ստուգեք, թե արդյոք մուտքը կամ գլխավոր օղակը խափանված են, կամ արդյոք շրջանցիկ կոնտակտորը կարող է խափանվել և շղթան նորմալ դարձնել, կամ արդյոք սիլիկոնային կառավարման վահանակը բաց է, կամ արդյոք շարժիչի միացումը որոշ խափանումներ ունի։ | |||||||||
| Err06 | անհավասարակշռված եռաֆազ | Ստուգեք, թե արդյոք մուտքային եռաֆազ հոսանքը և շարժիչը որոշ սխալներ ունեն, կամ արդյոք հոսանքի տրանսֆորմատորը ազդանշաններ է տալիս։ | |||||||||
| Err07 | մեկնարկային գերհոսանք | Եթե բեռը չափազանց մեծ է կամ շարժիչի հզորությունը կիրառելի է մեղմ մեկնարկիչի միջոցով, կամ PC-ի (ելքի պաշտպանությունը թույլատրված է) կարգավորման արժեքի սխալը։ | |||||||||
| Err08 | գործառնական գերբեռնվածության պաշտպանություն | Եթե բեռը չափազանց ծանր է կամ P7 է, PP կարգավորման սխալ է։ | |||||||||
| Err09 | ցածր լարում | Ստուգեք, թե արդյոք P9-ի մուտքային լարումը կամ կարգավորման ամսաթիվը սխալ են։ | |||||||||
| Err10 | գերլարում | Ստուգեք, թե արդյոք մուտքային լարումը կամ PA-ի կարգավորման ամսաթիվը սխալ են։ | |||||||||
| Err11 | տվյալների կարգավորման սխալ | Փոփոխեք կարգավորումը կամ սեղմեք «Enter» կոճակը՝ վերագործարկումը սկսելու համար | |||||||||
| Err12 | բեռնման կարճ միացում | Ստուգեք, թե արդյոք սիլիկոնը կարճ միացում չունի, կամ բեռը չափազանց ծանր է, կամ շարժիչի կծիկը կարճ միացում ունի։ | |||||||||
| Err13 | վերագործարկման միացման սխալ | Ստուգեք, թե արդյոք արտաքին մեկնարկային տերմինալ 9-ը և կանգառի տերմինալ 8-ը միացված են երկգծային տեսակին համապատասխան։ | |||||||||
| Err14 | Արտաքին կանգառի տերմինալի միացման սխալ | Երբ PD կարգավորումը 1, 2, 3, 4 է (թույլատրվում է արտաքին կառավարման), արտաքին կանգառի տերմինալ 8-ը և ընդհանուր տերմինալ 10-ը կարճ միացում չեն առաջացնում։ Միայն եթե դրանք կարճ միացում լինեին, շարժիչը կարող է մեկնարկվել։ | |||||||||
| Err15 | շարժիչի թերբեռնվածություն | Ստուգեք շարժիչի և բեռի սխալը։ | |||||||||
Մոդելի համարը
Արտաքին կառավարման տերմինալ
Արտաքին կառավարման տերմինալի սահմանում
| Փոխել արժեքը | Տերմինալի կոդ | Տերմինալի ֆունկցիա | Հրահանգ | |||||||
| Ռելեի ելք | 1 | Շրջանցման ելք | կառավարման շրջանցիկ կոնտակտոր, երբ մեղմ մեկնարկիչը հաջողությամբ մեկնարկում է, այն առանց էլեկտրամատակարարման կոնտակտ չէ, հզորություն՝ AC250V/5A | |||||||
| 2 | ||||||||||
| 3 | Ծրագրավորվող ռելեի ելք | Արդյունքի տեսակը և գործառույթները կարգավորվում են P4-ով և PJ-ով, այն առանց կոնտակտի է առանց էլեկտրամատակարարման, հզորություն՝ AC250V/5A | ||||||||
| 4 | ||||||||||
| 5 | Անսարքության ռելեի ելք | Երբ մեղմ մեկնարկիչը խափանումներ է ունենում, այս ռելեն փակ է, առանց էլեկտրամատակարարման կոնտակտ չկա, հզորությունը՝ AC250V/5A | ||||||||
| 6 | ||||||||||
| Մուտքագրում | 7 | Ժամանակավոր կանգառ | Փափուկ մեկնարկիչը նորմալ մեկնարկելու դեպքում այս տերմինալը պետք է կրճատվի տերմինալ 10-ով։ | |||||||
| 8 | Կանգնեցնել/վերագործարկել | միանում է 10-րդ տերմինալին՝ 2-գծային, 3-գծային համակարգերը կառավարելու համար, ըստ միացման մեթոդի։ | ||||||||
| 9 | Սկսել | |||||||||
| 10 | Ընդհանուր տերմինալ | |||||||||
| Անալոգային ելք | 11 | սիմուլյացիայի ընդհանուր կետ (-) | 4 անգամ անվանական հոսանքի ելքային հոսանքը 20 մԱ է, այն կարող է նաև հայտնաբերվել արտաքին հաստատուն հոսանքի չափիչով, այն կարող է ունենալ ելքային բեռի առավելագույն դիմադրություն՝ 300։ | |||||||
| 12 | մոդելավորման հոսանքի ելք (+) | |||||||||
Ցուցադրման վահանակ
| Ցուցիչ | Հրահանգ | ||||||||
| ՊԱՏՐԱՍՏ | Երբ սարքը միացված է և պատրաստ է, այս ցուցիչը վառվում է | ||||||||
| ԱՆՑՆԵԼ | շրջանցիկ համակարգի գործարկման ժամանակ այս ցուցիչը վառվում է | ||||||||
| ՍԽԱԼ | երբ խափանում է տեղի ունենում, այս ցուցիչը թեթև է | ||||||||
| A | սահմանման տվյալները ընթացիկ արժեքն են, այս ցուցիչը լուսավորվում է | ||||||||
| % | կարգավորման տվյալները ընթացիկ տոկոսն են, այս ցուցիչը վառ է | ||||||||
| s | տվյալների սահմանումը ժամանակն է, այս ցուցիչը լուսավորվում է | ||||||||
վիճակի ցուցիչի հրահանգ
Կոճակի հրահանգ
RDJR6 շարքի մեղմ մեկնարկիչն ունի 5 տեսակի աշխատանքային վիճակ՝ պատրաստ, աշխատանք, խափանում, մեկնարկ և կանգառ, պատրաստ, աշխատանք, խափանում։
ունի հարաբերական ցուցիչի ազդանշան։ Հրահանգը տե՛ս վերևում գտնվող աղյուսակում։
Փափուկ մեկնարկի և փափուկ կանգառի գործընթացներում այն չի կարող տվյալներ սահմանել, միայն եթե այն գտնվում է այլ վիճակում։
Կարգավորման վիճակում, կարգավորման վիճակը կդադարեցվի առանց որևէ գործողության 2 րոպեից հետո։
Սկզբում սեղմեք «Enter» կոճակը, այնուհետև լիցքավորեք և միացրեք մեկնարկիչը։ Ահազանգը լսելուց հետո կարող եք վերագործարկել
տվյալների վերադարձի գործարանային արժեքը։
Արտաքին տեսքը և տեղադրման չափերը
Կիրառման դիագրամ
Նորմալ կառավարման դիագրամ
Հրահանգ:
1. Արտաքին տերմինալը ընդունում է երկու գծի tcontrol տեսակը: Երբ KA1-ը փակ է մեկնարկի համար, բաց է կանգառի համար:
2. 75 կՎտ-ից բարձր հզորությամբ փափուկ մեկնարկիչը պետք է կառավարի շրջանցիկ կոնտակտորի կծիկը միջին ռելեով, քանի որ փափուկ մեկնարկիչի ներքին ռելեի կոնտակտի սահմանափակ շարժիչ հզորությունը։
12.2 մեկ ընդհանուր և մեկ սպասման կառավարման սխեմա
12.3 մեկ ընդհանուր և մեկ պահեստային կառավարման սխեմա
Հրահանգ:
1. Դիագրամում արտաքին տերմինալը ընդունում է երկգծային տեսակը
(երբ 1KA1-ը կամ 2KA1-ը փակ է, այն միանում է։ Երբ դրանք կոտրվում են, այն կանգ է առնում։)
2. 75 կՎտ-ից բարձր հզորությամբ մեղմ մեկնարկիչը պետք է կառավարի շրջանցիկ կոնտակտորի կծիկը միջին ռելեի միջոցով՝ մեղմ մեկնարկիչի ներքին միջին ռելեի կոնտակտի սահմանափակ շարժիչ հզորության պատճառով: